智能座舱系列五:AR-HUD
编辑导读:在有关飞行的电影中,总是能看见很酷的一幕:飞行员从挡风玻璃上就能看见许多重要信息,从而做出判断。这种显示系统叫做HUD,现在也应用于汽车上。本文作者对此进行了分析,希望对你有帮助。
一、概念
HUD,即抬头显示(Head Up Display),又叫平视显示系统。它的作用,就是把时速、导航等重要的行车信息,投影到驾驶员前面的挡风玻璃上,让驾驶员尽量做到不低头、不转头就能看到。
这种显示系统,原是军用战斗机上的显示系统,飞行员不必低头,就能在挡风玻璃上看到所需的重要信息。
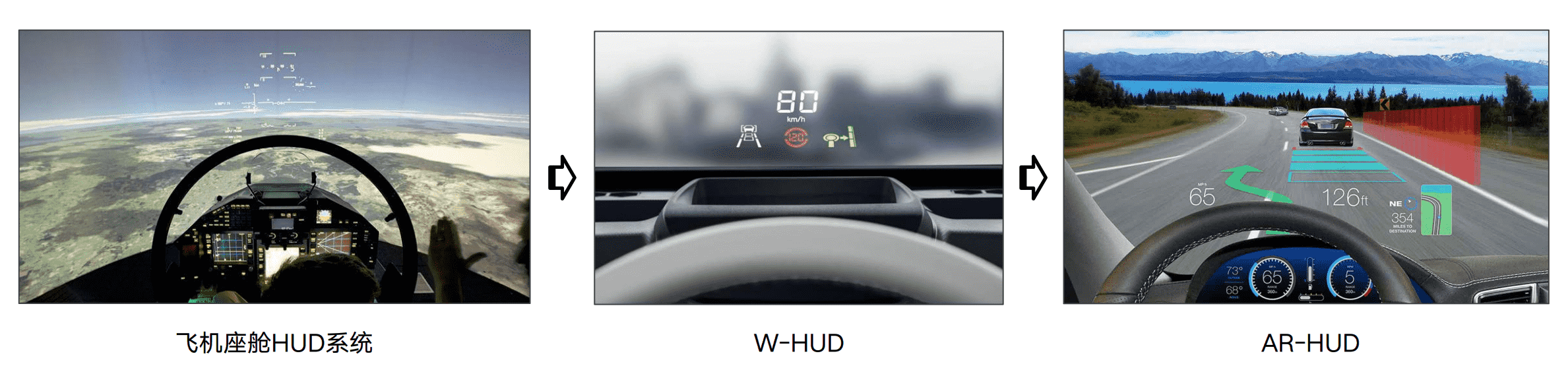
二、HUD产品演进
HUD应用在汽车上已经有十几年,对驾驶员也同样可以起到主动安全的作用,继而催生出最初的C-HUD、W-HUD,多见于高端车型。
AR-HUD 是AR增强现实技术和HUD抬头显示相结合的一种新型的车用HUD,与C-HUD和W-HUD最大的不同之处在于,AR-HUD拥有更大的视场角和更远的成像距离,而且可以直接将显示效果叠加到现实路面。未来两到三年,AR-HUD将会面临量产的爆发期,是未来智能座舱的重要组成部分。
三、AR-HUD的主要功能
我们整理AR-HUD的功能,可以理解为三大类:车况及导航系统内容、车生态服务信息、行人预警
1)车况及导航系统内容
主要作用是显示当前车况及行驶信息,道路识别以及导航引导
一般包含的功能:
如车辆状况,胎压监测、油量/电量、续航等;
如行驶状况,时速、转速/功率、能耗等;
如导航提示,转向、行驶里程、限速等。

2)车生态服务信息
主要作用是显示附近生活服务类的信息
一般会有:
餐饮、购物等基于LBS的消费引导;
加油/充电,停车、洗车等于车辆服务相关的引导。

3)行人预警
主要面向复杂环境下的行人监测和提醒,助力安全出行
比如在多路口的特殊路段、夜晚行车环境下,通过监测车辆前方的行人,在车内提醒和预警驾驶员,注意行人。

四、行业情况
各大厂商的AR HUD的量产时间集中在2020年~2021年 目前各大主机厂,包括国内品牌和国外品牌,都在与供应商共同研发AR HUD的量产方案,包括一汽、广汽、大众、宝马等厂商,且时间点均在2020年~2021年。可以说,最近两年年会是AR HUD爆发的时间。

五、AR-HUD技术原理
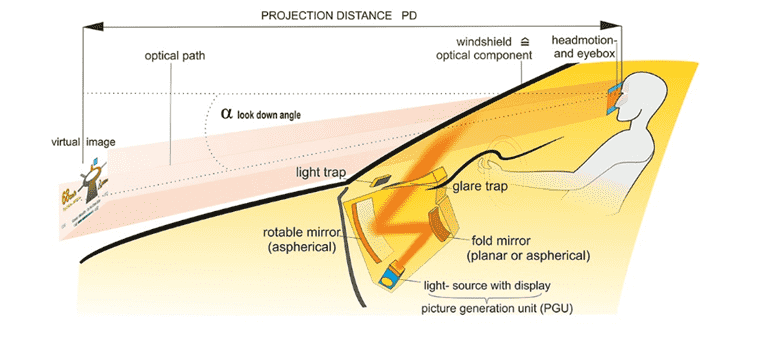
HUD的主要设计原理是离轴三反射镜光学系统。即图形显示器(PGU)产生图像——小反射镜(fold mirror)折转光路——大反射镜(rotable mirror)反射放大——风挡玻璃反射进入人眼成像。
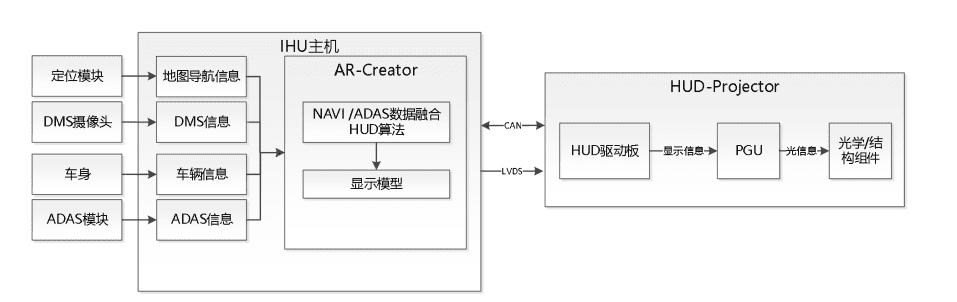
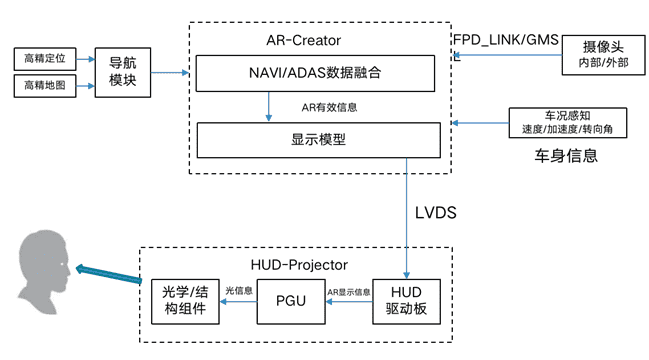
AR-HUD则是将显示效果和内容叠加到现实路面,系统架构图及系统框图如下:
六、AR-HUD的开发难点
AR HUD理论上需要15米以上的成像距离,HUD的体积因为光路需求而大到一般车辆装不下。
AR-HUD的规格也有相关要求,比如:
够宽的FOV,可以cover车道线,因此越宽越好,目前标准的FOV为10°×5°;
够远的VID,虚像可以稳稳锁定对应的实物(10m以上最佳);
需要搭配AR Creator来配合运作;
HUD的凹面镜和凸面镜之间需要足够的光路空间,才能满足FOV以及虚像VID的要求,因此HUD的体积达到15L;
除此之外,AR-HUD在落地过程中要注意以下问题:
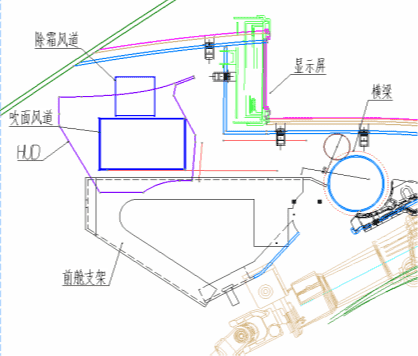
1. 安装
AR HUD体积较大,散热结构设计复杂,要求高,且易与仪表板管梁和空调管路干涉,需要预留足够大空间进行布置;
AR HUD投影面积更大、距离更远,HUD自身曲面镜较大,目前开模资源较少,良品率较低,成本较高;
需要安装HUD的车中控、管道、仪表、除霜口需要经过专门的设计,以便于以上部件与HUD之间不发生干涉。
HUD不能安装在任意位置,首先必须满足驾驶者的视野,只能安装在驾驶员的正前方。
HUD的设计是基于整车的眼点、风挡玻璃、机舱盖、中控台等数据,因此与整车的设计是一个双方不断沟通、协调的过程。
2. AR-Creator需要实现的功能复杂
1)HUD显示与车道线 matching
在多车道的情况下,车辆在第几车道,会影响AR-HUD投影信息指示的正确性,故车辆本身须具备车道侦测的相关技术,提供目前在第几车道的信息,且侦测补正系统会有时间延时,因此必须加上提前预测算法。相关技术:影像识别
2)HUD显示与车头方向 matching
AR HUD显示的信息须避开前方车辆遮蔽,投影在路面上,故需侦测前方障碍物的位置,动态调整AR HUD显示的信息位置,且侦测补正系统会有时间延时,因此必须加上提前预测算法。相关技术:77Ghz毫米波雷达/影像识别。
3)HUD显示与前方障碍物标定 matching
AR-HUD虚拟图像与车外实景结合时,会因车主的坐姿差异产生视角的差异,故需侦测眼球位置,动态调整虚拟图像的投射角度变动。相关技术:DMS/影像识别
4)HUD显示与转弯路口 matching
HUD显示的转弯箭头要达到精准标定到实际道路的路口,有以下需求:
精密地图:提供路口精准的经纬度位置;
精准定位:提供车辆所在的精准经纬度与方向;
车头晃动补偿:HUD显示必须补偿车头上下晃动的偏差;
收集高精度地图与V2X及六轴向陀螺仪、影像识别、毫米波雷达、GPS等各类传感器,通过复杂数字演算,精确定位目前车辆的位置,精密度需要至10cm等级。
七、开发方式
基于以上,一般AR-HUD的开发为合作,主机厂基于域控制器平台,AR Creator只做软件,AR-HUD算法供应商提供库或可执行文件给主机厂集成到域控制器中。系统由AR-Creator算法及HUD-Projector显示光机组成。AR-Creator负责融合导航、ADAS、车辆信号等信息,进行图像渲染及虚实重叠后,把显示模型输出给光机,光机负责解码、显示。
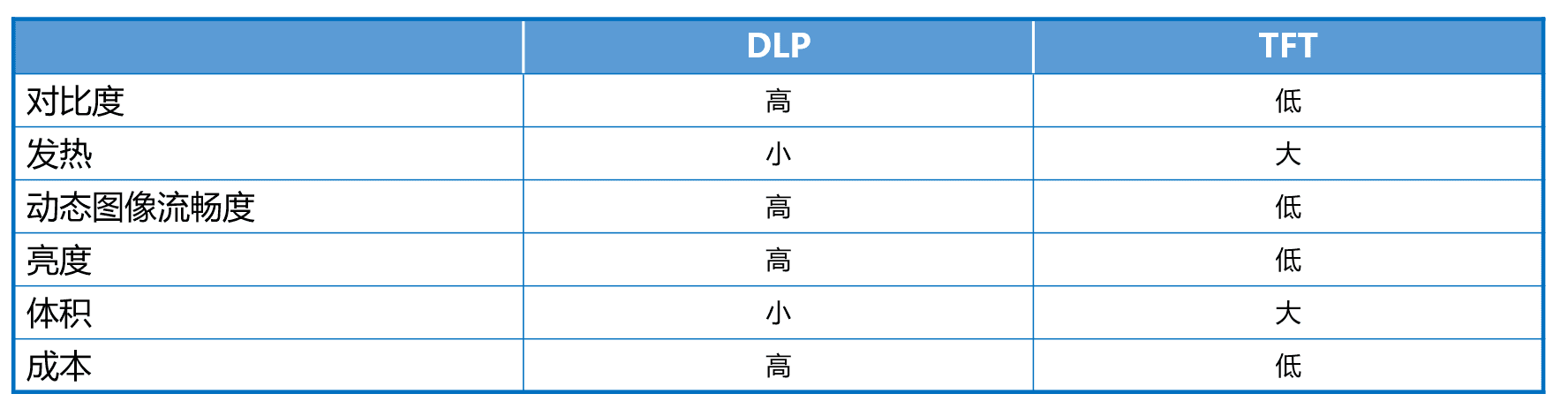
PGU目前有TFT和DLP两种实现方案。二者在相同成像尺寸上,DLP方案在整体性能上,要优于TFT方案,同时价格也会更高。
当然,市场上还有Mini AR-HUD方案(折中成本)、AR-HUD激光方案(质量优先),主要差异在于体积、成像质量和费用成本。激光方案的成像质量最好,体积最小,但成本最高。各车企根据自身情况会有不同的选择偏向。
作者 @赛博七号
版权声明
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处。如若内容有涉嫌抄袭侵权/违法违规/事实不符,请点击 举报 进行投诉反馈!
