cousera Aerial Robotics 无人飞行器 笔记1
第一周 综述
写在前面
这个暑假花了大概整整一周时间拿到了课程的证书,本课程主要内容是四旋翼的系统设计和控制,本课程对于运动学和动力学的数学推导有着比较详细的介绍,并在编程作业中对四旋翼的控制和路径规划进行了仿真,前置课程主要是自动控制原理和理论力学,编程作业主要是用Matlab,目前还没有中文字幕。
由于作者水平有限,可能存在错误,还望指正。
各种各样的无人飞行器
- aerial robots | 空中机器人
- Unmanned Aerial Vehicles(UVA) | 无人机
- Remotely Piloted Vehicles(RPVs) | 遥控飞行器,课程中将其也归为无人机
- Drones | 最常见的无人机叫法
- Quadrotor | 四旋翼
这些无人飞行器中的微型飞行器主要包括固定翼,扑翼和旋翼几种,本课程主要研究旋翼机中的四旋翼。
为什么选择四旋翼作为教授对象?
因为四旋翼结构简单,桨叶短而硬,飞行器在忽然转向时,桨叶不会因为陀螺力矩而扑动,也因此,四旋翼的建模比较容易。
四旋翼如何控制其姿态和位置?
将四旋翼的四个旋翼顺时针标号为1,2,3,4,其1,3转子的转动方向为逆时针,2,4转子方向为顺时针。
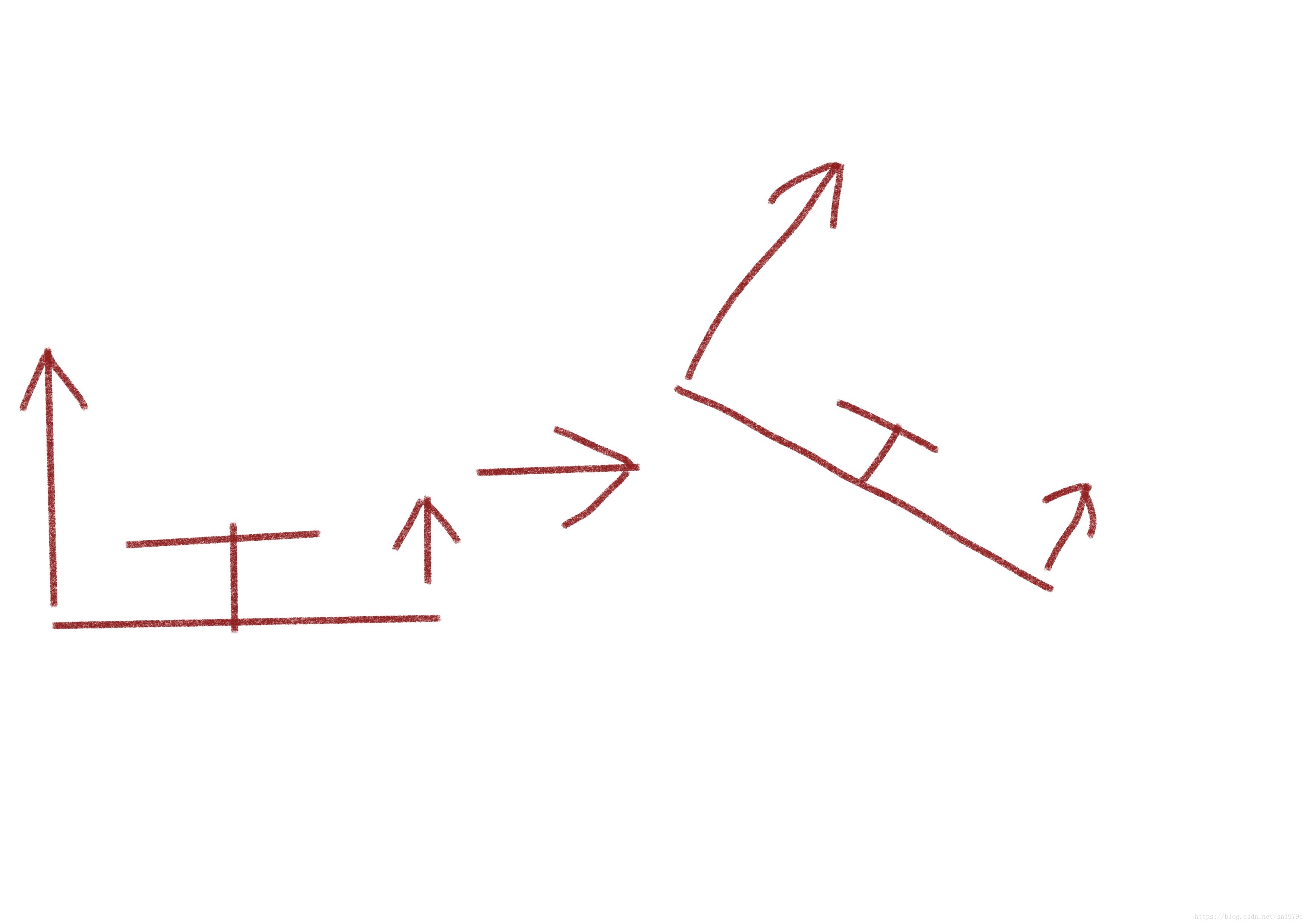
滚转和俯仰
机体坐标系下,滚转是绕X轴的运动,俯仰是绕Y轴的运动,四旋翼通过改变相对的一对旋翼的转动速度来产生滚转和俯仰力矩。
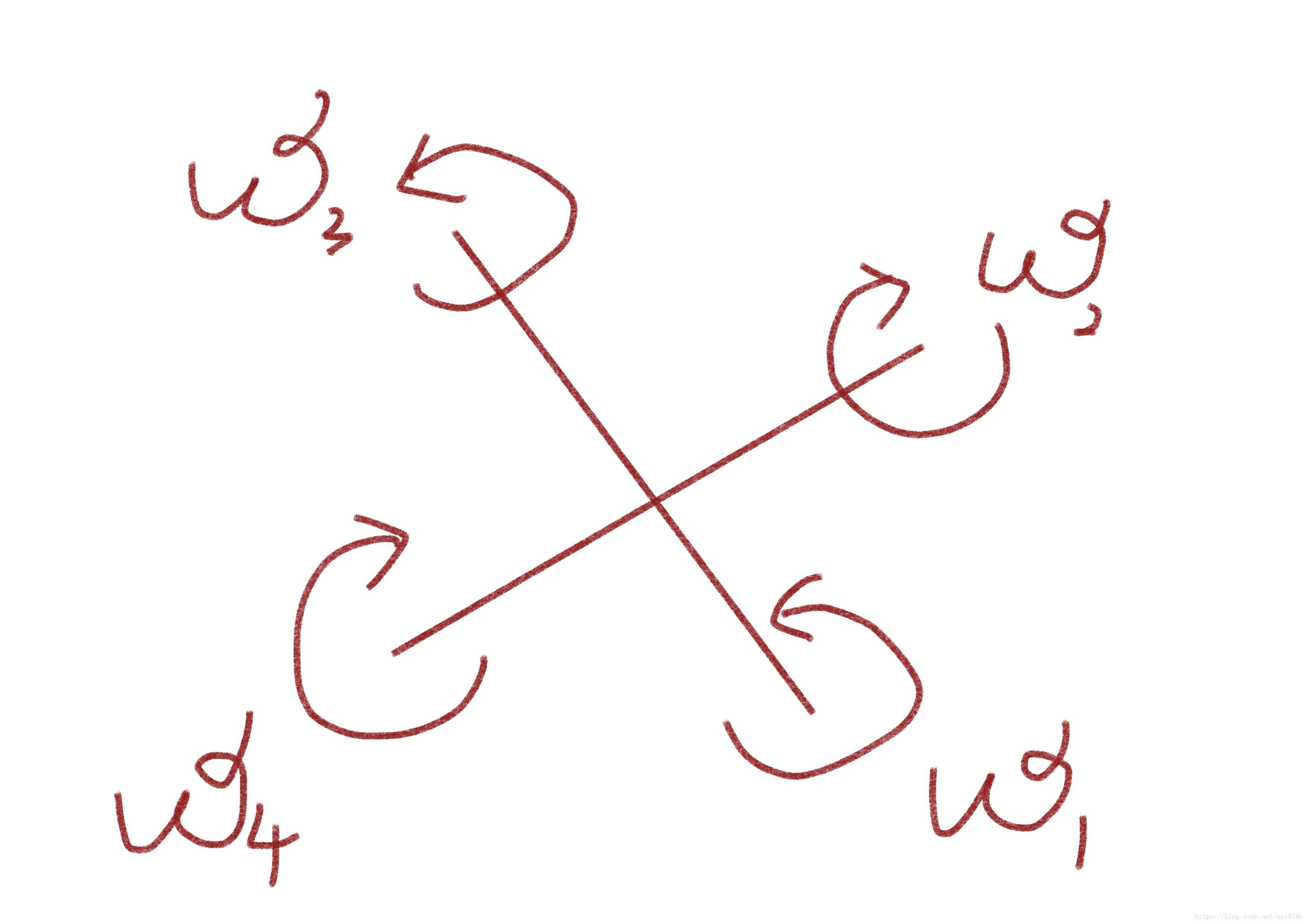
偏航
机体坐标系下,偏航是绕Z轴的运动,比如要控制飞行器顺时针旋转,则2、4电机减速,1、3电机加速,即逆时针旋转的速度加大,产生偏航力矩。
实现自动飞行有哪些关键因素
- State Estimation 估计出飞行器当前的位置、速度和姿态等。
- Control 根据目标状态和当前状态,计算出电机指令。
- Mapping 绘制所在环境的地图(商业级四旋翼一般无此功能)。
Planning 在已知外界环境和目标地点的情况下,规划出一条避障轨迹。
SLAM(Simultaneous Localization And Mapping)简介
SLAM也是当前人工智能中计算机视觉领域的一个热门方向,该问题可以表述为下:
机器人在未知环境中从一个未知位置开始移动,在移动过程中进行自身定位,并在自身定位的基础上建立环境地图,实现自主定位和导航。即同时实现Stae Estimation和Mapping。
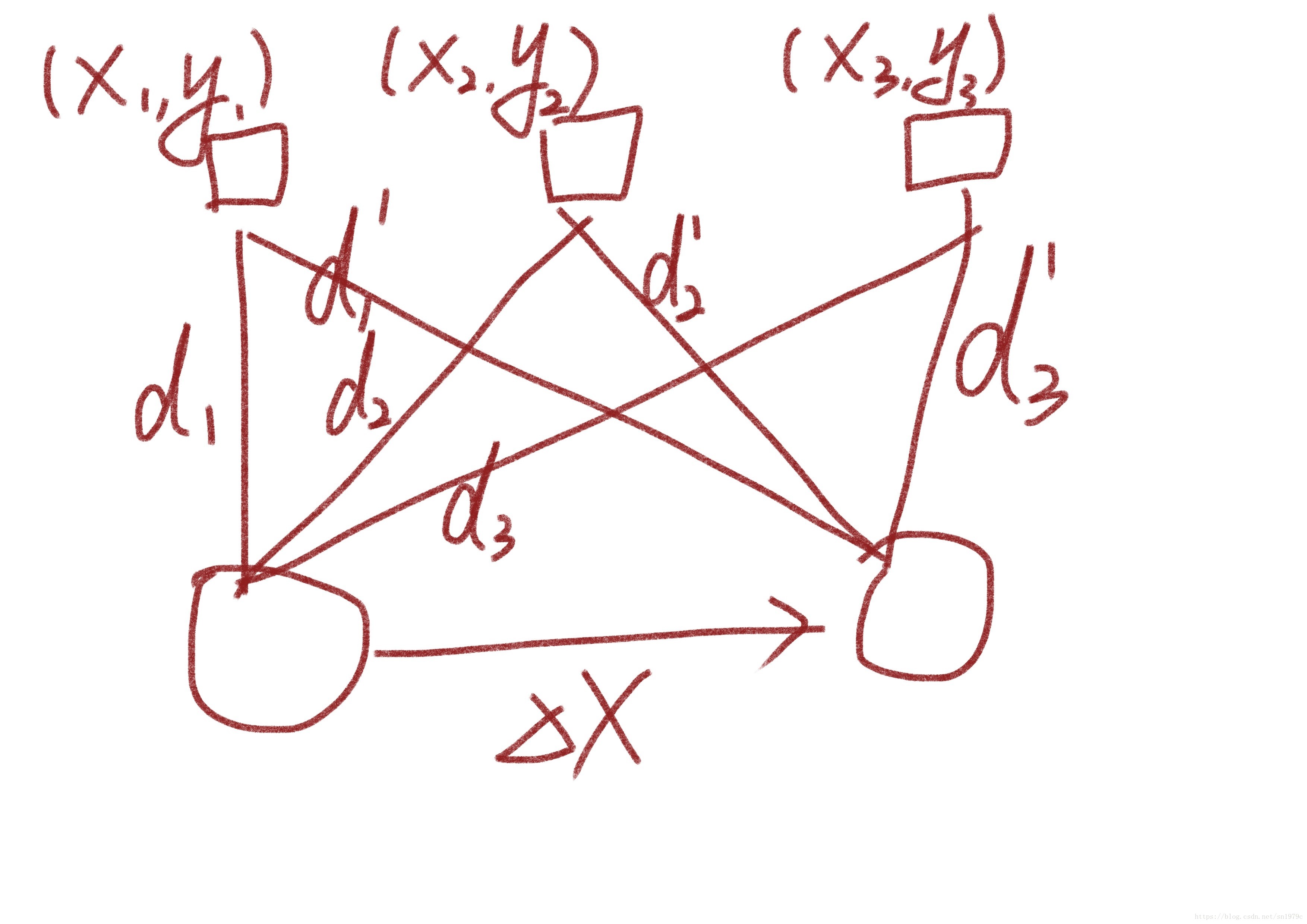
SLAM问题如上图所示,已知 d 1 , d 2 , d 3 , d 1 ′ , d 2 ′ , d 3 ′ d_1,d_2,d_3,d_1',d_2',d_3' d1,d2,d3,d1′,d2′,d3′,同时估计 x 1 , x 2 , x 3 , δ x x_1,x2,x_3,\delta x x1,x2,x3,δx。
动力系统和系统设计
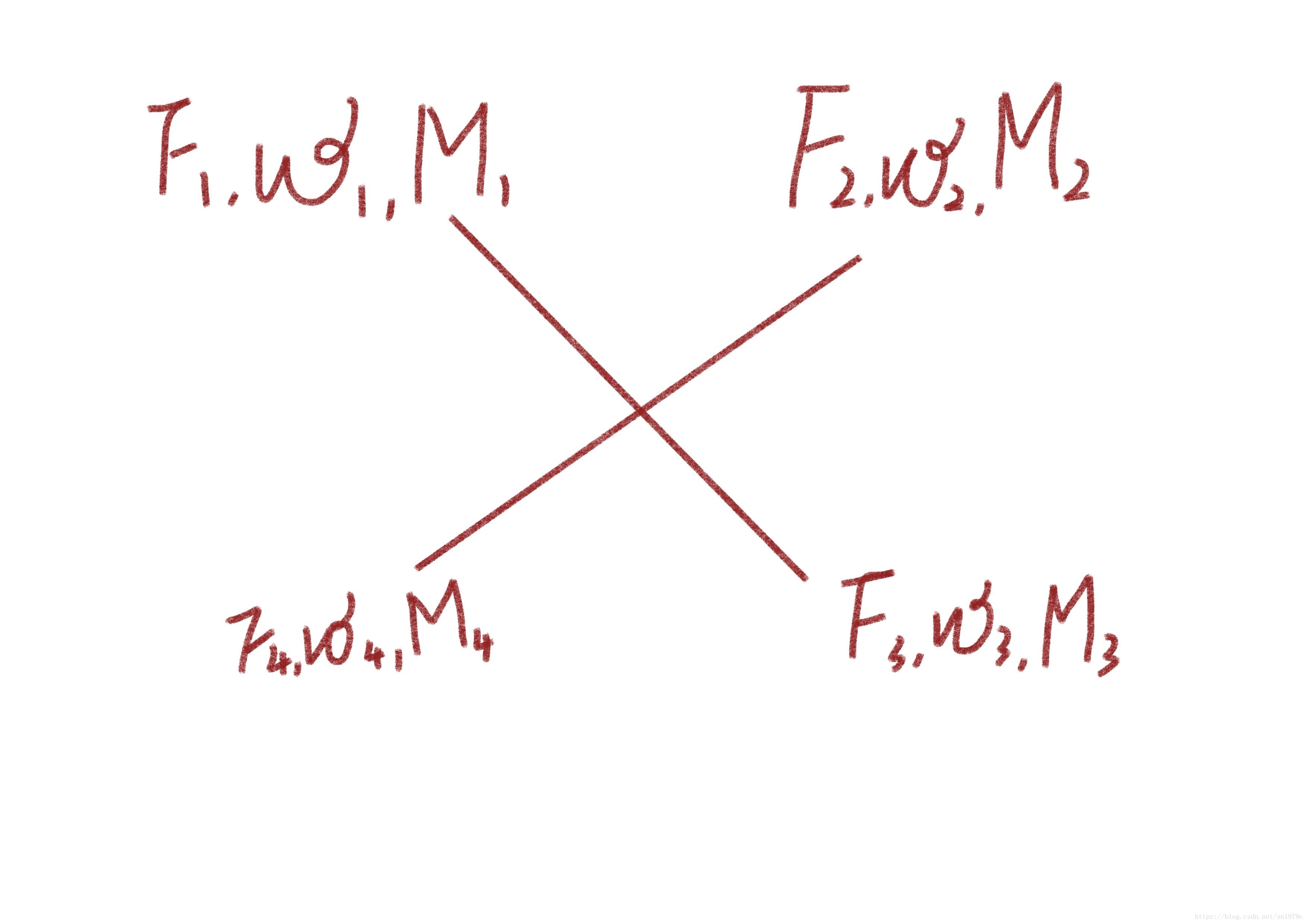
平衡方程
F = ∑ i = 1 4 F i − m g a 3 M = ∑ i = 1 4 r i F i + M i F = \sum_{i=1}^4{Fi}-mga_3 M = \sum_{i=1}^4{r_iF_i+M_i} F=i=1∑4Fi−mga3M=i=1∑4riFi+Mi
控制方程
PD控制
u ( t ) = x d e s + k v e ( t ) ( 1 ) u(t) = x^{des} + k_v e(t)^{(1)} u(t)=xdes+kve(t)(1)
当 k v > 0 k_v>0 kv>0且 k p > 0 k_p>0 kp>0时,系统稳定, k p k_p kp增大,系统的超调量 σ \sigma σ增大,反应更加迅速, k v k_v kv增大,系统的阻尼增大。
PID控制
u ( t ) = x d e s + k v e ( t ) ( 1 ) + k i ∫ e ( t ) d t u(t) = x^des + k_ve(t)^{(1)} + k_i\int e(t)dt u(t)=xdes+kve(t)(1)+ki∫e(t)dt
I项主要应对未知参数的扰动
设计上的一些考量
能量
四旋翼一般功率比重量的量级约为200W/Kg,固定翼约为120W/Kg,锂电池能提供的量级一般为400W/Kg。可以看出固定翼的效率比旋翼高近一倍。
机动性
yz平面内的四旋翼动力学模型

[ y ( 2 ) z ( 2 ) ϕ ( 2 ) ] = [ 0 − g 0 ] + [ − 1 m c o s ( ϕ ) 0 1 m c o s ( ϕ ) 0 0 1 I x x ] [ u 1 u 2 ] \begin{bmatrix} y^{(2)}\\z^{(2)}\\\phi^{(2)} \end{bmatrix} = \begin{bmatrix} 0\\-g\\0 \end{bmatrix} + \begin{bmatrix} -{1 \over m}cos(\phi)&0\\ {1 \over m}cos(\phi)&0\\ 0& 1 \over I_{xx} \end{bmatrix} \begin{bmatrix} u_1\\u_2 \end{bmatrix} ⎣⎡y(2)z(2)ϕ(2)⎦⎤=⎣⎡0−g0⎦⎤+⎣⎡−m1cos(ϕ)m1cos(ϕ)000Ixx1⎦⎤[u1u2]
u 1 u_1 u1为所有旋翼的合拉力, u 2 u_2 u2为所有旋翼的力矩
尺寸效应
l为四旋翼的臂长,r为旋翼的半径,m为四旋翼的质量。
Froude scaling
m m m ~ y 3 y^3 y3
F F F ~ π r 2 ∗ ( ω r ) 2 \pi r^2 * (\omega r)^2 πr2∗(ωr)2 ~ l 2 v 2 l^2v^2 l2v2
M M M ~ F l Fl Fl ~ l 3 v 2 l^3v^2 l3v2
α \alpha α ~ $M\over I $ ~ v 2 / l 2 v^2 / l^2 v2/l2
v v v ~ l 1 / 2 l^{1/2} l1/2
Mach Scaling
v v v ~ 1 1 1
F F F ~ l l l
a a a ~ 1 / l 1/l 1/l
α \alpha α ~ 1 / l 2 1/l^2 1/l2
结论
尺寸越小越敏捷
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!